
【技术分享】脑卒中患者足下垂的预防、评估及康复治疗方案!
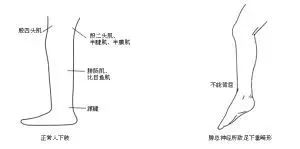
足下垂是由小腿的前肌群和外侧肌群麻痹,而小腿后肌群痉挛牵拉所引起的,表现为不能背屈足部,行走时或是拖曳病足或是将该侧下肢举得较高,落地时总是足尖先触地面的一种症状,因此在步行周期的摆动相,患者不能完成踝背屈动作,而形成特征性的足下垂步态。

一、足下垂形成的原因:
曾认为足下垂是周围神经损伤、脊髓运动神经损伤和肌营养不良所形成。足下垂多数是由于腰5神经或周围神经损伤引起,第五腰神经根损伤可由转移性神经纤维瘤、脑膜瘤压迫脊髓圆锥引起。周围神经损伤多为位于小腿前侧的胫骨损伤引起,多数周围神经损伤的原因为:外科手术或睡眠时对周围神经的压迫,石膏的紧压和产科马镫的压力引起。这些危险因素在体形消瘦的人群中可能增加,这些也可基于糖尿病性神经病变的基础上。腓骨下段的损伤也可能引起腓神经损伤。Gathrie et al认为大脑损伤也可引起足下垂,并常伴有巴彬斯基征阳性和踝反射阳性,将其称为“痉挛性足下垂”。后来Dietz认为:肌张力增加可能是综合力学的原因——牵拉反射作用增加了僵硬度和关节周围的肌肉、结构发生活化而发生了生物力学变化。按足下垂瘫痪类型可分为:弛缓性瘫痪和痉挛性瘫痪。弛缓性瘫痪又称下运动神经元瘫痪或周围性瘫痪是指脊髓前角细胞和脑干脑神经运动核及其发出的神经轴突损伤,它是接收锥体束、锥体外系统和小脑系统各种冲动的最后共同通路,是运动冲动到达骨骼肌的唯一途径。L5脊髓前角细胞损害则使踝关节及足趾背曲不能而形成弛缓性足下垂。痉挛瘫痪又称上运动神经元瘫,因其瘫痪肢体肌张力增高而得名。本文主要探讨脑中风(上运动神经元损伤)后足下垂的康复方法。
脑中风病人足下垂是由于中枢神经系统受损,反射性交感神经营养不良、神经血管萎缩而引起的一种并发症。也与调节踝关节伸肌体位反射(除外肌肉活动的背景下)以改变重力-支撑负担水平的变化有关。
中枢神经损伤后引起的足下垂是肢体瘫痪的表现形式之一,是痉挛期下肢伸肌痉挛模式的组成部分,也是制约步态及步行能力的重要因素。中枢神经损伤患者的足下垂是高位中枢神经损伤造成的运动障碍,以往一直认为其直接原因为小腿三头肌肌群张力异常增高、痉挛所致。后通过综合大量有关的实验和临床研究后提出,痉挛不只是中枢失去对低位中枢的控制,也与肌肉纤维和肌腱的物理特性改变有关,而且很可能与制动和废用有关。
制动会引起肌肉、肌腱和结缔组织被动和主动特性的改变,包括肌肉纤维类型、交叉桥结缔组织的改变,肌小节的丧失、水分的丧失,胶原沉积和粘滞性的改变,造成肌肉僵硬、张力增高,构成了关节活动阻力增加的因素。如果小腿三头肌持续痉挛得不到牵伸而致跟腱挛缩,将使得可逆性足下垂转变为不可逆性足下垂。
此外,由于患者长期制动,小腿前肌群(胫前肌)及外侧肌群(腓骨长短肌)激活不足,肌肉出现废用性肌萎缩,导致足背伸困难。这种足背肌/趾屈肌间肌力的不平衡,使得患肢足下垂、内翻及足跟不能正常着地,而显得患侧下肢较健侧“长”,同时由于膝伸肌痉挛使得膝关节屈曲不充分,导致典型的代偿性“划圈步态”。这对患者行走,上下楼梯及日常生活是很不利的。
因此,纠正足下垂,打破伸肌痉挛模式,使踝部产生主动性踝背伸,对纠正步态,提高步行能力有很大意义。
二.足下垂的预防:
随着康复医学的进展,康复治疗应从起病到恢复期贯穿于医疗护理各个环节和全过程中。对急性脑中风病人护理工作中预防足下垂是很重要的,通过对病人患侧足早期的护理,防止足下垂的发生,有利于患侧足的正常功能部分或完全恢复。
(1)温热疗法:准备能容纳足的小浴槽两个,先将患侧足浸于380-400温水中8-10分钟,再浸入180冷水中8-10秒,反复3次,以温水开始冷水结束,2次/d。
(2)布鞋疗法:准备硬底新布鞋一双(比病人的足大2-3号),将患侧的一只鞋(以鞋尖朝上、鞋跟朝下、鞋底向床尾栏杆、鞋面向病人)垂直固定在病人在床尾栏杆上。每晚临睡前将患侧的足放进鞋内,足跟处垫适量柔软的海绵等物防止压破足跟处皮肤,使患侧的足略高于对侧足3-5cm。每两三个小时将患侧足从固定的鞋内脱出检查足部血运及皮肤的颜色,温度和有无破损,按摩患足20分钟再嘱病人将足伸进固定鞋内。白天为病人的治疗时间,可不用布鞋疗法,急性脑血管意外病人在卧床期间,尤其夜间病人熟睡后都要用布鞋疗法预防足下垂,直至能离床活动时方可停止。
(3)ROM训练:首先以被动活动为主,从患足踝关节至脚趾,趾间各关节。每个关节均需辅以各个方向充分活动,使关节囊、关节周围肌腱充分伸展。手法轻柔,用力由小渐大,2次/天,30分钟/次。各关节充分被动活动后,对病人施以语言刺激,让病人做足的联合屈曲和联合伸展动作,训练要循序渐进,做不到不可强求。对肌张力高的肌群用安抚性质的按摩,使其放松,对肌张力低的则予以按摩和揉捏;对不能在床上做主动活动者,做患肢关节被动运动,通过病人的意念感觉和信心进行主动训练。重新塑造患足的运动行为模式加上基本功能训练。总之在脚趾将发生挛缩前期施以柔和的外力。关节被充分前拉、挤压刺激感觉和运动,防止足下垂促进功能恢复。
三.足下垂的评估:
目前尚无中枢神经损伤后足下垂的功能评估标准,但也可以借鉴骨科的综合评估标准,以助于我们在治疗过程中的疗效观察。目前评估标准可分为两大类:第一类以优、良、差作为分级标准,如GREEN和LIOYD-ROBERTS马蹄内翻足疗效评估标准:
优:外形正常、跖行足;踝关节被动活动至少超过中立位10度,并主动回复到中立位;跖屈大于20度,活动(包括各种比赛)不受限制。活动中或活动后无疼痛;距跟关节至少有一半的活动度,中跗关节活动正常。
良:轻微足跟内翻,前足可灵活内收,足以适应正常活动的需要,并不感到不适;至少能背伸到中立位,跖屈<10度。距跟关节至少有一半的活动度,中跗关节活动灵活。今后的软组织手术肯定不会影响以上功能。
差:比较明显的足跟内翻,或伴有轻微的前足固定内收畸形;踝关节活动受限,各个方向活动度<10度;距跟关节僵(活动度<50%),中跗关节活动度尚灵活;活动受限(包括比赛),训练中或活动后疼痛;需要再做骨性手术[10]。
第二类以分值作为评分标准,如LAAVEG和PONSETI马蹄内翻足疗效评价标准:
病人满意度:满意5、较少满意3、不满意0;
功能:疼痛(足踝)无8、过度活动时疼痛6、正常活动时疼痛4、走路时疼痛0;
步态:正常5、向内旋转或轻度跛行3、趾行步态或明显跛行0;
踝关节运动:背屈>10度,跖屈>40度8、背屈5度-10度,跖屈20度-40度6、背屈<5度或僵直在中立位4、僵直在复发位0;
肌肉功能:①胫骨前肌移位:正常肌力8、部分肌力4、无肌力0;②小腿三头肌:正常肌力8、部分肌力4、无肌力0;③胫骨后肌:正常肌力8、部分肌力4;无肌力0;
足外形:
①发育:发育良好和跖行足8、发育不良和跖行足6、轻度弓形足或外翻2、明显马蹄内翻足或/和弓形足或外翻0;
②足跟:中立位8、外翻<5度5、外翻>5度或内翻0;
③前足:中立位8、内翻或外翻<5度5、内翻或外翻>5度0;
④F-M角:>80度6、70度-80度3、70度0
⑤放射学测量A:TC-AP角:≥25度5、10度-24度3、<10度0;B:TC-L角:20度5、10度-19度3、<10度0;T-M角:20度5、21度-30度3、>30度[11]。
(注:F-M角足纵轴与内外踝连线之间的夹角,角度愈小,畸形愈重。TC-AP角:正位距角。TC-L角:侧位距跟角。T-M角:距跖角,距骨纵轴与第一跖骨的夹角)。
四.足下垂康复治疗的常用方法:
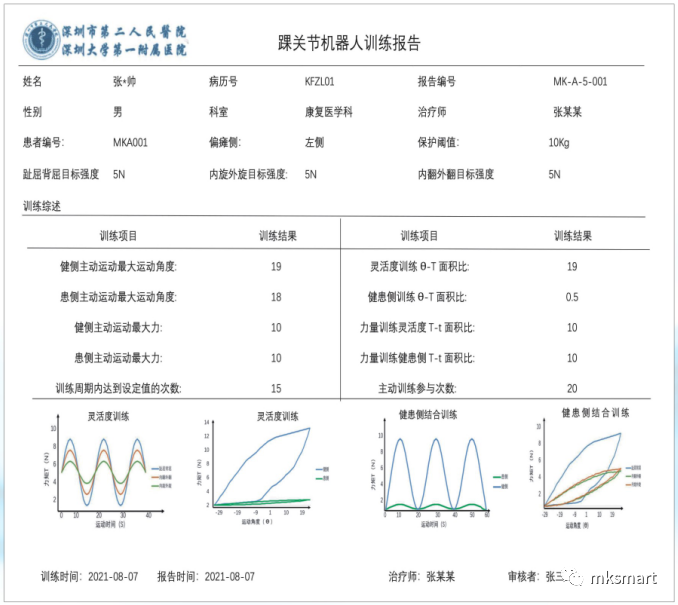
铭凯MK-A神经重塑踝关节康复机器人重点面向脑卒中早期住院患者,以脑神经重塑为核心,融合传统有效的康复临床训练方式,基于健患侧耦联训练系统,以健侧带动患侧,引导患者主动参与康复训练,加速神经结构重塑,缩短康复周期,提升患者康复效果。
铭凯神经重塑踝关节康复机器人历时12个月,组织了大量脑卒中患者开展临床试验,临床试验效果显著。
1、踝关节主动运动康复效果:实验组患者患侧踝关节的主动运动活动度(AROM)明显改善是对照组的2.3倍。
2、下肢运动能力康复效果:Fuglmeyer临床数据表明:实验组患者的下肢运动能力明显改善,为对照组的1.5倍。
3、Ashworth肌张力康复效果:肌张力有改善,但变化值未超1,证明康复效果来源于神经通路重塑。
MK-TH-BI治疗师临床仿生系统——人机共融再现治疗师手法
通过人工智能深度学习核心技术,将康复治疗师六大传统有效的康复治疗与训练方法仿生设计在机器人系统,实现患者单位时间内的多种训练刺激。
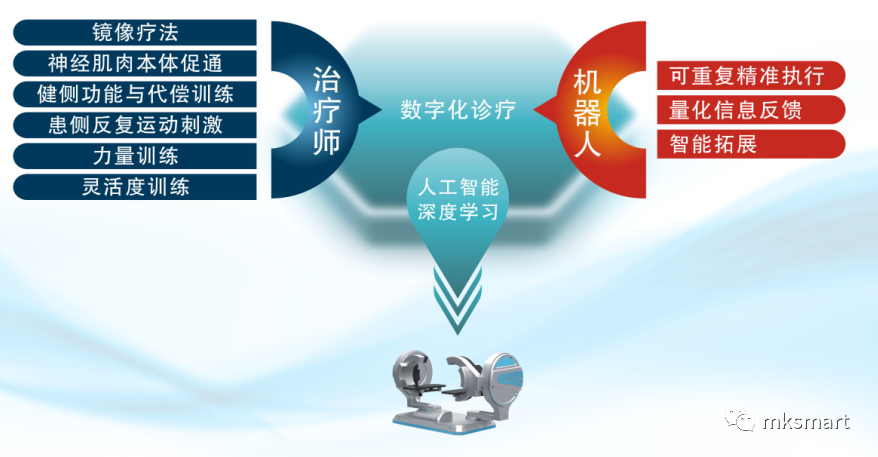
MK-H&A Coupling健患侧耦联系统——融合患者自主意念康复训练
全球首创MK-H&A Coupling健患侧耦联系统,让患者以健侧带动患侧,实现患者自主意念与主动参与康复训练的目标。
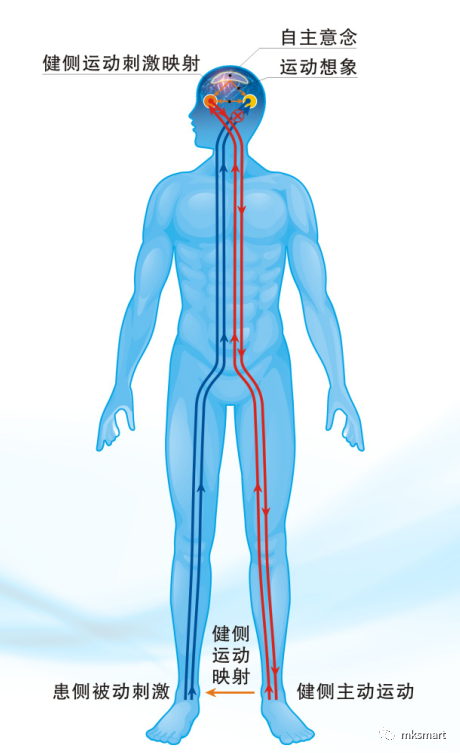
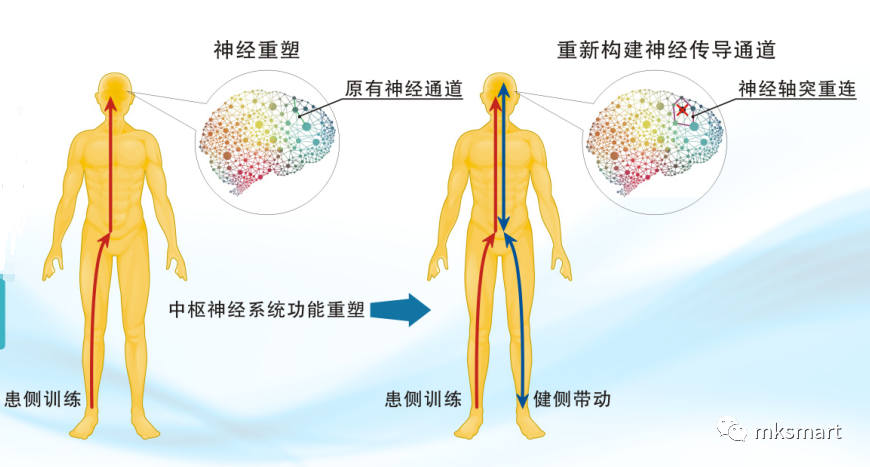
MK-NRS神经重塑系统——中枢神经系统功能重塑
通过自主意念、遇到弄想像、健侧运动映射、患侧运动刺激、感觉神经刺激,实现神经网络重构的双向刺激,加速神经重塑进程。
MK-RTM精准机器人训练系统——3大训练模式,12种基础训练方案
基于精准机器人训练系统,结合临床康复理念,内设灵活度训练、健患侧耦联训练、力量训练3大训练模式,12种基础训练方案,自由组合,极大地提升临床康复训练与治疗的灵活性。

MK-SDA康复运动数据分析系统——量化采集与分析患者运动数据表现
基于机器人本体数据传感器系统,实时检测患者康复运动数据,实时量化记录患者康复训练过程,为临床医生精准评估提供客观参考依据,助力康复科实现数字化、精准化康复诊疗。
MK-SAFP肌痉挛安全保护系统——肌痉挛安全保护
突发肌痉挛时,直接触发机器人的安全保护机制,避免患者继发伤害。

广东省科技成果鉴定专家委员会认为铭凯MK-A神经重塑踝关节康复医疗机器人成果在踝关节康复训练设备领域达到国际先进水平!
 科技创新让康复医疗更简单
科技创新让康复医疗更简单欢迎扫码关注我们!
邮箱
contact@mkrobotics.cn
电话:0755-32816725
0756-8988856
传真:0755-32816725
